
2017年11月16日,一段Atlas跳跃、旋转、后空翻的视频几乎惊艳了整个机器人圈,各大纷纷做了报道,我也在如何看待 Boston Dynamic 2017.11.16新发布的机器人 Atlas 视频?发表了情怀感言,当然只有情怀是不够的,作为技术工科男,还是应该多思考下其背后到底有什么技术。
在Flight Phases,Atlas并没有与接触,因此没有任何的接触力f_i,此时牛顿方程简化为:
在空中的过程实际是个抛物线运动,因此没有办法在空中改变Atlas的运动。上式中的欧拉公式可以简化为:
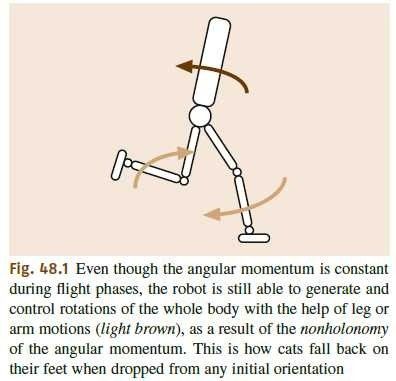
综上所述,在空中运动过程中,Atlas无法改变运动,但是可以改变姿态,也就是后空翻或是前空翻等复杂动作,只要在落地之前完成动作即可,当然跳以前也需要做步态和运动等的规划。
无论是什么样的接触面,Atlas与地面接触时的瞬间接触力常大的,因此对电机有非常高的要求,BD很聪明,选用了液压伺服控制。若是电机的话,可能分分钟爆掉。即使是液压伺服控制,也要考虑主动或是被动柔顺的控制。
个人觉得落地后的平衡相比于walk或是run的平衡相对简单,若是能将walk或是run过程中的平衡控制好,也许落地后的平衡相对较为容易,但是在跳跃之后与地面接触时的力控制就变成了难点。
在空中的时间设计尤为重要,若是时间较短,Atlas完不成空翻动作;若是时间较长,Atlas需要不停地调整姿态,以在接触地面前做好平衡的动作。
内容实在是太多,不可能通过一篇文章解释清楚,所以只给出了大概的解释和内容,起到抛砖引玉的效果。


网友评论 ()条 查看